


By Abigail Williams
The Haughton-Mars Project is a multi-disciplinary field research program located at the Haughton impact crater site on Canada’s northern Devon Island in the High Arctic. Devon Island is the largest uninhabited island in the world and the world’s leading analog test site for testing the technology that is destined for use on the red planet.
The Haughton-Mars Project (HMP) research station was established on Devon Island in 1997 and is supported mainly by NASA. A range of academic, non-profit, industry and government partners also run research programs at the station. These include the HMP Science Program, which is studying the biology and geology of the site to better understand the nature and evolution of the Moon and Mars in comparison with the Earth. At the same time, the HMP Exploration Program is using the site to test and validate technologies for use in the future exploration of the Moon and Mars and to train personnel for these exploration activities.
Barren, Rocky and Windswept
Dr Pascal Lee is director of the Haughton-Mars Project at NASA, chairman of the Mars Institute and a planetary scientist at the SETI (search for extraterrestrial intelligence) Institute. He describes the Haughton site on Devon Island as a “cold, dry, barren, rocky, windswept, unvegetated, UV-drenched, ice-rich, impact-scarred desert” which is “also how Mars is described.”
“The HMP site is of course less extreme than Mars, but among terrestrial field environments, it represents a step in the right direction,” he says.
By being more forgiving than Mars, Lee believes that the HMP site provides a good testing ground, where mistakes and errors can be made and then addressed or fixed before the unforgiving prime time of actual missions to Mars, human or robotic.
“What also makes the HMP site exceptional as a Mars analog is the wide range of geological features and biological attributes of relevance to Mars concentrated on Devon Island. This has earned the HMP site the nickname Mars on Earth,” Lee says.

The HMP site is also relevant to Moon mission research, in particular the exploration of the polar regions of the lunar surface. NASA’s Artemis program is targeting manned exploration of the lunar south pole by 2024, where water is present and the 20km-diameter Shackleton Crater is located. At the Shackleton Crater on the Moon there is ice at the surface and within the impact rubble, as well as permanent daylight along parts of the crater’s rim. These are all characteristics that Lee says “are also true of the HMP site in the summer”.
Spacesuits, aircraft and gloves
The HMP has been field testing robotic arms, rovers, aircraft and robotic drills for Martian exploration. Instrumentation such as cameras, spectrometers, radars, and sampling tools have been field tested there. The HMP has also conducted a number of key tests to help analyze the performance of human exploration equipment. These have included the first field tests of spacesuits for Mars exploration and trials of the use of ATVs (automated transfer vehicles) as unpressurized mobility systems. The Station has also hosted the first short and long-range pressurized rover traverse simulations, the first field tests of spacesuit informatics systems as well as the first experiments in field telemedicine in space exploration. Habitat studies, human factors and exploration behavioral studies for future Mars exploration have also been conducted at the research station.
A notable recent development at HMP was the testing of an Astronaut Smart Glove (ASG), which is designed to control drones with the use of simple gestures that can be performed by a person easily from within inside a pressurized spacesuit. The ASG is a joint research project between HMP, developers of spacesuit systems Collins Aerospace and the company behind the smart glove technology, Norway-based startup Ntention.


The main objective of the ASG’s field test was to show the feasibility of using a smart glove to control and interface with robotic assets of relevance to future human Moon and Mars exploration. Specific scenarios were examined, such as operating an unmanned aerial vehicle (UAV) for science and exploration tasks such as searching, surveying, examining, sampling, fetching, and inspection.
The UAV-handling qualities of the ASG were assessed using standard flight test metrics such as performing precision take-off and landings, flight direction control in wind and situational awareness. The results are helping to determine the requirements of the use of smart gloves during human spaceflight and to control EVAs (extra-vehicular activities) on the Moon and Mars.
Moina Tamuly, co-CEO and co-founder of Ntention says, “The terrain and harsh conditions present at Devon Island were a key factor in our research. When different challenges presented themselves while testing in the field as opposed to in a laboratory environment it was quite enthralling.
“For example, compasses don’t work that far north, which affects the drones’ navigation systems. Harsh weather also demanded that the technology was sufficiently durable,” he adds.
Spacesuit integration
The ASG test team used the HMP Analog Spacesuit for its test program by integrating the smart glove and a wearable AR (augmented reality) display into the spacesuit. “The field test of the ASG was a first, and successfully demonstrated the viability and promise of the ASG concept,” says Lee. “In drone operations the glove enabled all of the science and exploration tasks tested to be successfully performed. The drone handing qualities afforded by the ASG were also found to be significantly more precise than the handling that would be possible with a conventional commercial drone controller interface.”
The initial test phase has also cleared the way to plan the next phase of testing. This will include assessing the ASG’s performance using a pressurized spacesuit in a laboratory setting and integrating it into a higher fidelity analog spacesuit. The team is also looking at testing how the ASG performs in the field when controlling robotic assets such as robotic arms, ground vehicles, drills and cranes. It is also planning to test the ASG’s performance in the field again as part of end-to-end science and exploration scenarios, to assess how to transition in and out of ASG operations during field activities.
Future research
As the prospect of interplanetary exploration activity during the next decade becomes more likely, activity at HMP is increasing. Over the next year engineers at Haughton will help to field test a new spacesuit concept, run simulated pressurized rover traverse studies, human vehicular robotic arm operations studies, conduct more astronaut smart glove studies in detailed end-to-end exploration scenarios and field test a new robotic mobility system.
“Planned studies are in support of both near-term needs for NASA’s Artemis Program to the Moon, and longer-term needs for human Mars exploration,” says Lee. “The HMP is also planning to acquire a new rover to support a number of small pressurized rover operation studies for human Moon and Mars exploration and look at the use of electric ATVs as unpressurized rovers.
“Upgrades, but not necessarily an expansion, of the existing infrastructure are also anticipated,” he adds.
Analog Test Sites
Limitations on the amount of time, money, equipment and skilled staff that can be devoted to experiments in space mean that analog sites play a pivotal role in testing and problem-solving activities for space missions. Amongst other things, analog sites like the HMP Research Station help space agencies prepare for near-term and future missions to asteroids, the Moon and Mars in locations that are physically similar to harsh space environments.
Active analog test sites include:
- Desert Research and Technology Studies (Desert RATS), Black Point Lava Flow
in Arizona - In-Situ Resource Utilization at Mauna Kea in Hawaii
- Hawaii Space Exploration Analog and Simulation, Mauna Loa in Hawaii
- Inflatable Lunar Habitat Analog Study, McMurdo Station, Antarctica
- Flashline Mars Arctic Research Station, Nunavut, Canada
- Mars Desert Research Station, San Rafael Swell, Utah
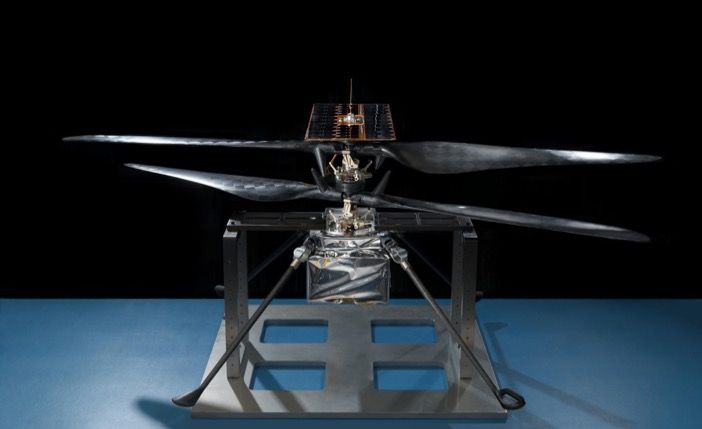
Mars Helicopter Scout
Anticipated to be the first aircraft to fly on another planet, the Mars Helicopter Scout (MHS) will be deployed from the Mars 2020 rover next year and is expected to fly five times during 30 days on Mars. Development of the MHS started in 2014 and it has undergone a series of tests in the Space Simulator, a 25ft (7.62m)-wide vacuum chamber at the NASA Jet Propulsion Laboratory (JPL) in Pasadena, California.
David Agle from JPL says that each test was designed to address a specific part of the laboratory’s verification and validation matrix, but also to “fill voids in our knowledge and experience of how to prove that a helicopter works in a Martian environment.”
The Space Simulator was configured to recreate a Martian atmosphere by sucking all of the ambient air out and allowing enough gas back in to simulate the density of atmosphere the Helicopter would experience on Mars.
“In addition to that we needed, to our best abilities, recreate the effect of gravity on Mars. This was accomplished with a custom-built gravity offload device that would pull the helicopter upwards with a string against an automated pulley, with the perfect amount of force to balance out the remaining gravitational forces,” says Agle.
Each test, venue, and campaign formed a key part of “baby-stepping”, where the team designs custom tests to prove out a certain part of the helicopter design only after extensive analysis and reviews. The test plan therefore progressed from flight testing a third scale lift demonstrator to a full scale proof-of-concept inside the vacuum created inside the Space Simulator. Vibration testing, thermal tests and deployment tests then followed.
“Each baby-step was a tremendous leap forwards towards building our confidence and understanding of how helicopters operate in 1% of Earth’s atmosphere and one third of its gravity,” says Agle.


